
Compétences & savoir-faire
- Mesure de la répétabilité et de la justesse d'axes et de robots de micro et nanopositionnement (résolution <1nm <1µrad)
-
Caractérisation mécanique basse fréquence de microstructures
-
Caractérisation des forces d'interaction aux échelles micro-nanométriques
-
Génération et mesure de micro et nanoforce en milieu sec, liquide et sous vide
-
Étalonnage de capteur de force avec des charges comprises entre 10 nN et 100 µN
-
Essais de compression transverse de fibres végétales (diamètres compris entre 10 et 100µm)
-
Essais de compression de cellules biologiques en milieu liquide (diamètres compris entre 10 et 150µm)
Équipements
- Microscope holographique LynceeTec DHM R2104
- Hexapod MKS-Newport HXP50HA-MECA
- Camera rapide Phantom Miro M310 8GB Mono
-
Interféromètres laser ATTOCUBE
-
Capteurs confocaux-chromatiques STIL et PRECITEC
-
Accéléromètre haute précision 1-axe PCB Piezotronics
-
Capteurs de force (résolution nN)
-
Microscopes optiques 1x, 5x, 10x, 20x
-
Manipulateurs eppendorf de cellule individuelle
-
Micro-manipulateurs Smaract et Physics Instruments
-
Systèmes de contrôle-commande dSPACE
-
Générateur 1-axe de microforces
-
Table anti-vibration active TMC Everstill
-
Enceinte climatique de métrologie Kambic (température et humidité)
-
Enceinte à vide ALLIANCE CONCEPT (260 l, vide primaire)
Réalisations

Métrologie de micro-forces
 |
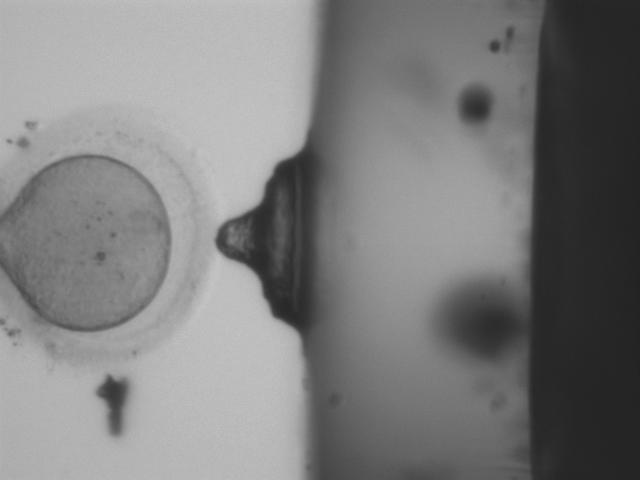 |
Caractérisation du comportement mécanique d'un ovocyte humain
Contacts
Joël Abadie joel.abadie@femto-st.fr
Emmanuel Piat emmanuel.piat@ens2m.fr
Cédric Clévy cedric.clevy@femto-st.fr
Guillaume Laurent guillaume.laurent@ens2m.fr