
Descriptif de la station
Cette station permet de réaliser des microsystèmes en 3D ou en 4D (3D actionnés). Elle est équipée d’une colonne électronique, SEM pour réaliser des images ou des soudures. Elle est aussi équipée d’une colonne FIB qui permet de découper la matière à forte puissance, de plier des membranes à puissance moyenne et de faire des dépôts à puissance faible. Cette colonne permet aussi de faire des images. Cette station dispose de 2 manipulateurs, la platine du microscope avec 5 degrés de liberté et un robot SmartAct à 6 degrés de libertés, 3 translations, et 3 rotations. Cette station est construite comme une micro salle blanche.
Taille des objets manipulables : 20nm -100µm
Environnement : vide secondaire
Savoir faire spécifique : assemblage micro et nanométrique sous vide à l’aide d’un robot SmartAct et d’une très haute résolution (FEG), usinage FIB

Exemples de domaines applicatifs / exemples d’usages possibles : capteur à cristaux photonique en bout de fibre, origami de silice poly articulée, assemblage complexe
Exemples d'applications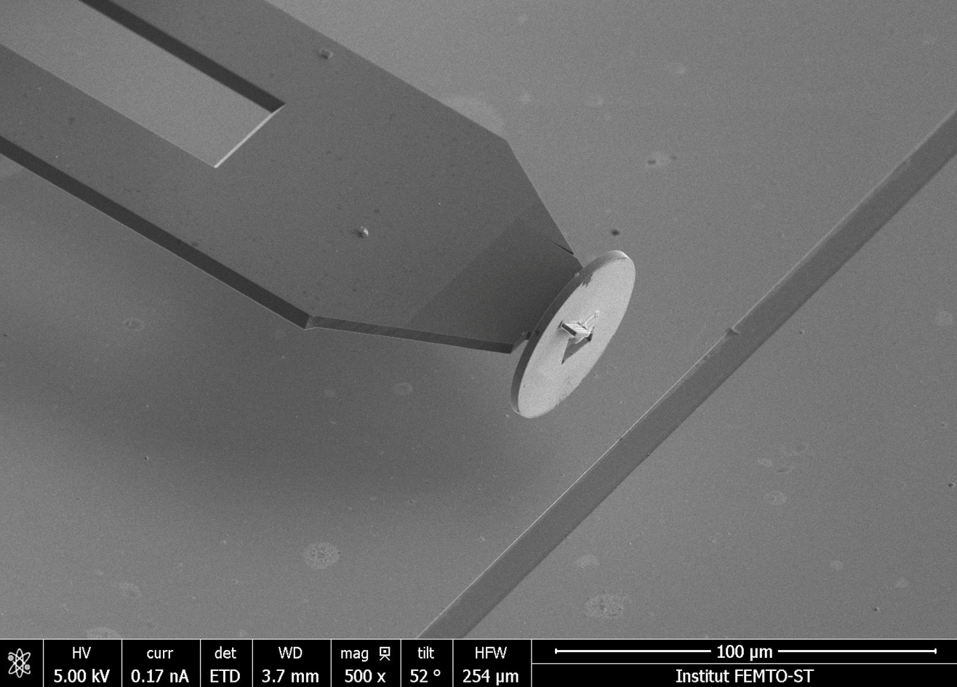
Assemblage de composants nanophotoniques par contrôle robotique dynamique (précision < 10 nanomètres)

Structure nanorobotique (une pince ici) obtenue par pliage de silice par ions focalisés et actionnée électrothermiquement
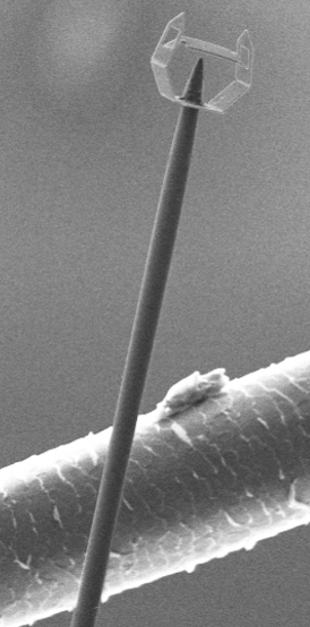
Structure robotique poly-articulée constituée d’origami en silice et intégrant son actionnement par faisceau laser (à côté d’un cheveu)
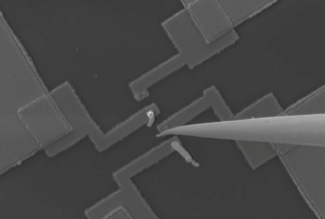
Outils microrobotiques permettant la caractérisation électrique locale et versatile de dispositifs nanoélectroniques tridimensionnels industriels (ici des nanotubes de carbone)
Composition de la station
-La préparation d’échantillons peut se faire à l’aide d’un métaliseur Leica, qui permet de déposer quelques nanomètres de carbone, de platine ou d’or.
-La préparation des échantillons peut aussi se faire à l’aide d’un évaporateur qui permet de déposer de quelques nanomètres à presque 1µm d’aluminium, de chrome, de cuivre
-Un robot est installé sous vide à l’intérieur de la grande chambre du MEB, il possède 6 degrés de liberté et il peut « collaborer » avec la platine.
-La station se compose d’un MEB Auriga 60 de Zeiss, d’un FIB Orsay physics et d’un injecteur de gaz Oxford Instrument équipé de 3 ligne de gaz, XeF2, cyclopentadiényl platine, et naphtalène.
Conditions d’utilisation : formation de plusieurs jours avant utilisation en autonomie
Responsables
Responsable scientifique : Sounkalo Dembélé
Responsable technique : Jean-Yves Rauch