
Descriptif de la station
Cette station permet de mesurer la répétabilité et la justesse d'axes et de robots de micro et nanopositionnement dans le plan et dans l’espace avec des résolutions inférieures à 1 nm en translation et 1 µrad en rotation
Plages de mesure :
15 cm pour Tx et Tx
100 µm pour Tz
+/- 5° pour Rx et Ry
360° pour Rz
Résolutions
<1 nm pour Tx, Ty, Tz
< 1 µrad pour Rx, Ry, Rz
Savoir faire :
Métrologies des déplacements aux petites échelles, mires et marqueurs sur mesure, développements logiciels associés

Exemples de domaines applicatifs : La métrologie robotique utilise des mires étalonnées et un code de traitement d'images (Vernier) qui permet de mesurer les poses d’axes et de robots avec des résolutions inférieures au nanomètre. Les différents types de mires couvrent une large gamme d'applications.
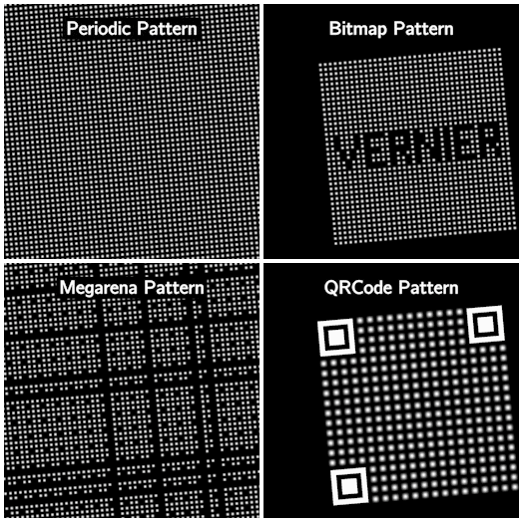
Mires
Caractérisation d’axes de micropositionnement
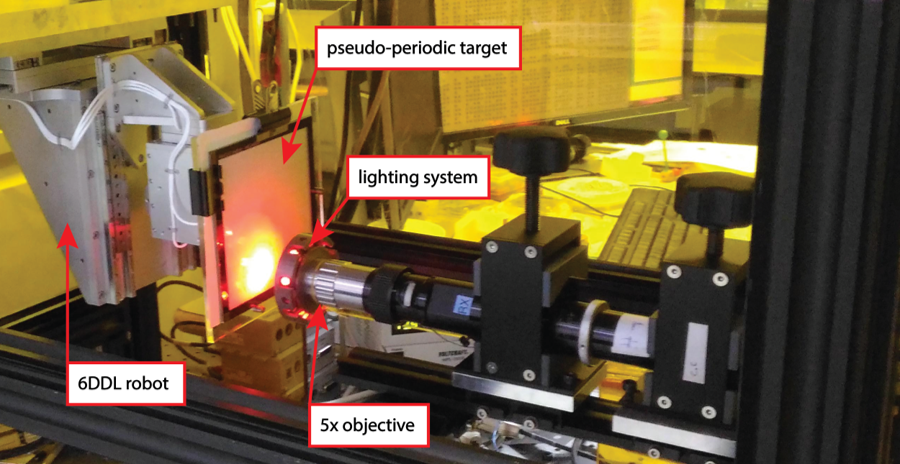
Caractérisation de robots de micromanipulation
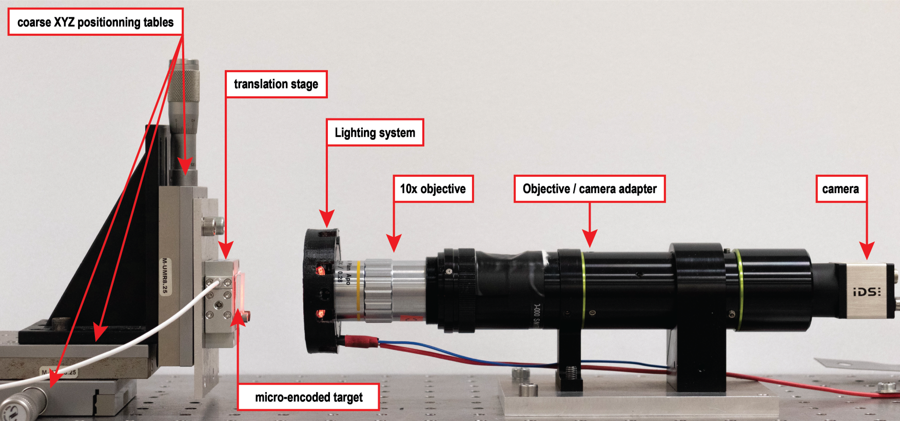
Equipements
Microscope holographique LynceeTec DHM R2104
Hexapod MKS-Newport HXP50HA-MECA
Nanopositionneur Physik Instrumente P-528.TCD TzRxRy
Logiciel vernier https://projects.femto-st.fr/vernier/
Conditions d'accès : ouvert aux collaborations scientifiques et industrielles
Responsables
Responsable scientifique : Guillaume Laurent, Patrick Sandoz
Bibliographie
André, A. N., Sandoz, P., Mauzé, B., Jacquot, M., & Laurent, G. J. (2020). Sensing one nanometer over ten centimeters: A microencoded target for visual in-plane position measurement. IEEE/ASME Transactions on Mechatronics, 25(3), 1193-1201.
André, A. N., Lehmann, O., Govilas, J., Laurent, G. J., Saadana, H., Sandoz, P., ... & Clévy, C. (2022). Automating Robotic Micro-Assembly of Fluidic Chips and Single Fiber Compression Tests Based on Visual Measurement With High-Precision Fiducial Markers. IEEE Transactions on Automation Science and Engineering.