
Descriptif de la station
Cette station permet de contrôler le déplacement d’outils par un bras de robot à tubes concentriques commandé en temps réel par un Linux (Xenomai) avec des cartes Beckhoff.
Nombres de degrés de liberté : 6 (3 tubes)
Environnement : liquide, canaux fluidiques
Savoir faire spécifique : modélisation, conception en fonction d’un cahier des charges, commande en boucle fermée
Composition de la station
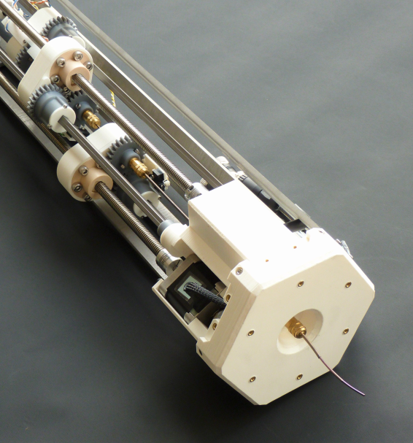
-Robot à tubes concentriques et son système de commande
-Interface Omega.7
-Capteur Aurora
-Microscope confocale
-Capteur de force Nano 17
Conditions d’utilisation : ouvert aux collaborations scientifiques et industrielles
Responsables
Responsable scientifique : Kanty Rabenorosoa
Responsable technique : François Marionnet, Olivier Lehmann, Pierre Roux